Temps de réponse du contrôle
Lors du contrôle des actifs (VE, batteries), le SmartgridOne Controller envoie une commande à l'appareil, qui a ensuite besoin de temps pour traiter cette commande et ajuster son état en conséquence. Cela s'appelle le temps de réponse du contrôle.
Le temps nécessaire pour cela, ainsi que le temps qu'il faut au SmartgridOne Controller pour envoyer une nouvelle commande, dépendent des facteurs suivants :
- Le type d'appareil (par exemple, batterie, chargeur VE, pompe à chaleur)
- La vérification de stabilisation
- La limitation sur le bus RS485
- L'intervalle du planificateur
Lorsque votre SmartgridOne Controller est actif dans les services auxiliaires, un temps de réponse rapide est crucial.
Sur cette page, nous expliquerons comment ces facteurs influencent le temps de réponse du contrôle et comment vous pouvez l'optimiser pour votre cas d'utilisation spécifique.
Astuce
Points clés :
- N'utilisez pas Modbus-RTU (RS485) lorsque plusieurs appareils sont connectés au bus RS485. Utilisez Modbus-TCP à la place.
- Désactivez les réglages de montée et de descente progressive sur les appareils qui le supportent, comme les batteries et les onduleurs, pour permettre des temps de réponse plus rapides.
- Désactivez la vérification de stabilisation, si vous comprenez les implications.
- Réglez l'intervalle du planificateur à 1 seconde pour un traitement plus rapide des commandes.
Pour une explication complète de ces facteurs, continuez la lecture ci-dessous.
Le type d'appareil
Différents types d'appareils ont des temps de réponse intrinsèquement différents en raison de leurs caractéristiques techniques et protocoles de communication :
Batteries et/ou onduleurs solaires (y compris les onduleurs hybrides)
- Temps de réponse généralement rapides (1-5 secondes)
- Le temps de réponse dépend principalement des contrôles internes de l'onduleur
- Peut avoir des taux de montée en puissance intégrés pour les transitions de puissance
Chargeurs VE
- Temps de réponse moyen (5-15 secondes)
- La réponse dépend de :
- Protocole de communication (OCPP, Modbus, propriétaire)
- Capacités de charge du véhicule
- État actuel de charge
- Doit respecter les exigences de courant minimum de charge
Pompes à chaleur
- Temps de réponse plus lent (30-180 secondes)
- Ajustements progressifs de la puissance pour protéger le compresseur
- Le temps de réponse est affecté par :
- Mode de fonctionnement (chauffage/refroidissement)
- Conditions de température actuelles
- Mécanismes de protection internes
Relais et interrupteurs
- Temps de réponse rapides (1-5 secondes)
- Typiquement utilisés pour un contrôle simple marche/arrêt
Astuce
Pour un contrôle optimal, considérez le dispositif ayant le temps de réponse le plus lent lors de la configuration de vos paramètres de contrôle. Cela garantit un fonctionnement stable sur tous les appareils connectés.
La « vérification de stabilisation »
Lorsque l'on travaille avec plusieurs marques, protocoles et modèles d'appareils, la patience devient essentielle. Bien que des appareils comme les batteries, onduleurs et chargeurs VE répondent généralement rapidement aux commandes, ils ont besoin de temps pour mettre à jour leurs mesures et les renvoyer au Controller.
Deux facteurs clés affectent les temps de réponse :
- Les compteurs d'énergie peuvent envoyer des données à des cadences plus lentes, ce qui signifie qu'ils ne reflètent pas immédiatement les dernières actions de l'appareil
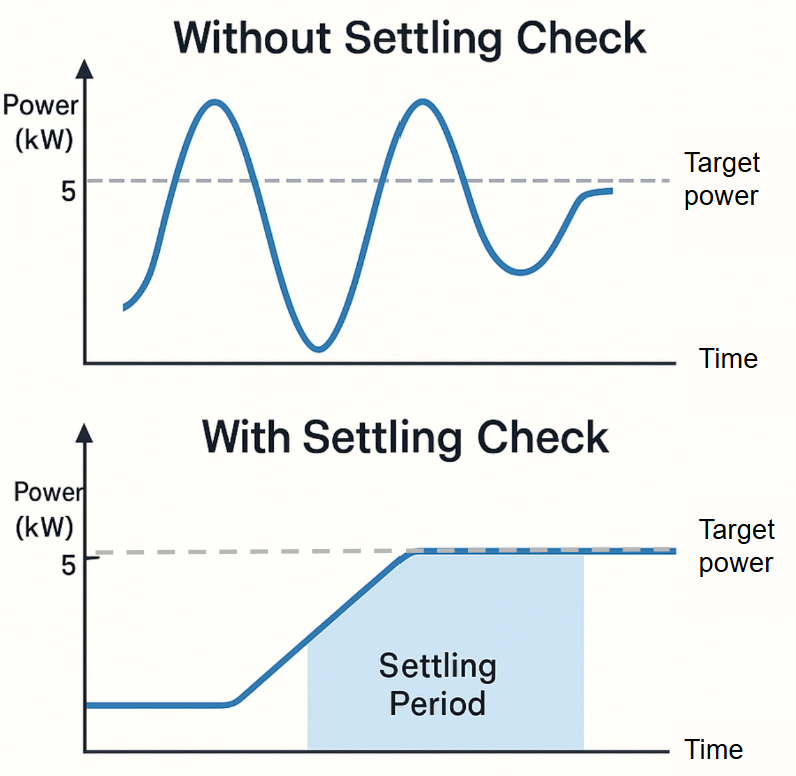
- Les appareils ont souvent besoin de temps pour monter en puissance et se stabiliser afin d'atteindre leurs états cibles
C'est là que les vérifications de stabilisation deviennent importantes. Une vérification de stabilisation est une période d'attente qui garantit que les appareils ont pleinement atteint les états commandés avant que de nouvelles décisions ne soient prises. Pensez-y comme à laisser retomber la poussière après un changement. Sans ce mécanisme, notre système de contrôle pourrait réagir à des états temporaires pendant la période de transition. Cela conduirait à des corrections inutiles - similaire à essayer de se stabiliser sur une plateforme instable tout en corrigeant constamment, ce qui aggraverait la situation.
Notre implémentation surveille trois aspects cruciaux : premièrement, elle vérifie que les mesures sont récentes et fiables, assurant que nous ne réagissons pas à des informations obsolètes. Deuxièmement, elle suit comment les flux de puissance changent dans le temps, confirmant que les appareils répondent comme prévu. Enfin, elle respecte les délais inhérents aux réponses des appareils, donnant à l'équipement le temps nécessaire pour atteindre un fonctionnement stable.
Considérez un site avec deux appareils : un système de batterie moderne et une ancienne pompe à chaleur. Lorsque nous envoyons une commande pour réduire la consommation de 5 kW :
| Temps | Batterie | Pompe à chaleur | Réponse du système |
|---|---|---|---|
| 0:00 | 0kW | 5kW | Commande envoyée : réduction de 5kW |
| 0:01 | -2kW | 5kW | Batterie répond rapidement |
| 0:03 | -2kW | 3kW | Pompe à chaleur commence à répondre |
| 0:05 | -2kW | 3kW | Attente de la stabilité |
| 0:07 | -2kW | 3kW | Le système confirme l'état stabilisé |
La batterie répond presque immédiatement, mais le système de contrôle plus ancien de la pompe à chaleur met plus de temps à s'ajuster et à rapporter son nouvel état. Sans vérifications de stabilisation, nous pourrions interpréter ce délai comme un échec de réponse et envoyer des commandes supplémentaires, ce qui pourrait déstabiliser le système. Au lieu de cela, notre contrôleur attend patiemment que tous les appareils rapportent des états stables avant de prendre de nouvelles décisions.
La chronologie exacte de ce flux ressemble alors à ceci :
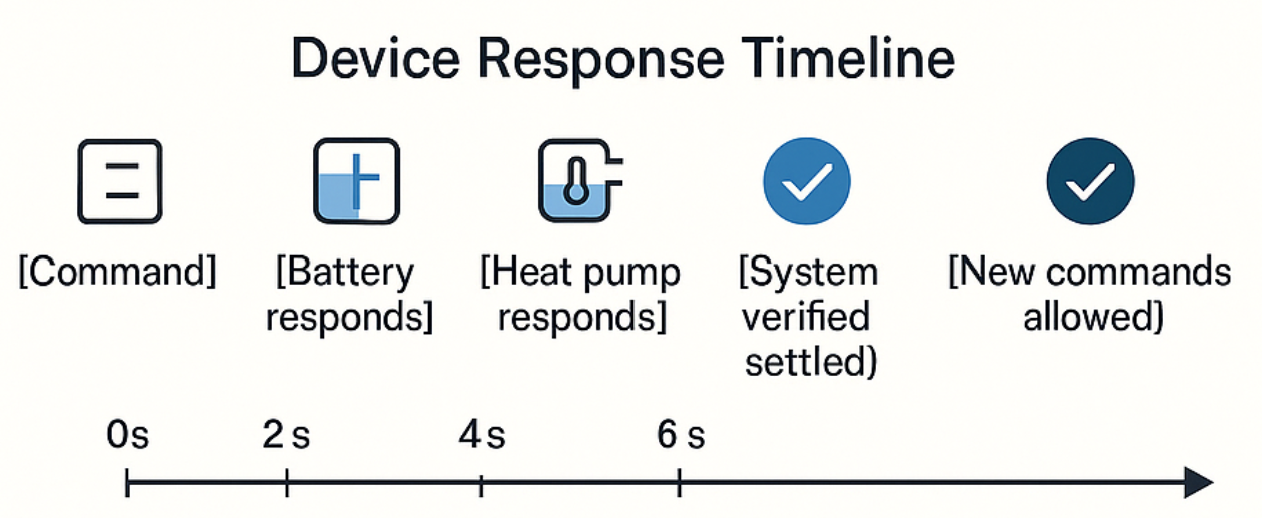
Cette approche mesurée peut sembler trop prudente, mais dans le monde des systèmes électriques, la stabilité et la longévité de l'équipement l'emportent largement sur l'attrait des ajustements rapides et répétés.
Désactivation de la vérification de stabilisation
Avertissement
- La désactivation n'est pas recommandée et ne doit être effectuée qu'en cas exceptionnel. Sinon, vous risquez de déstabiliser le système et de provoquer des oscillations.
- Procédez avec prudence et uniquement si vous comprenez parfaitement les implications et privilégiez la rapidité sur la stabilité.
La vérification de stabilisation peut être désactivée dans l'application SmartgridOne Controller sous les paramètres avancés. Cela permettra au contrôleur d'envoyer des commandes sans attendre que les appareils se stabilisent, ce qui peut accélérer le temps de réponse.
Click here to see the instructions
- Ouvrez la page des paramètres :
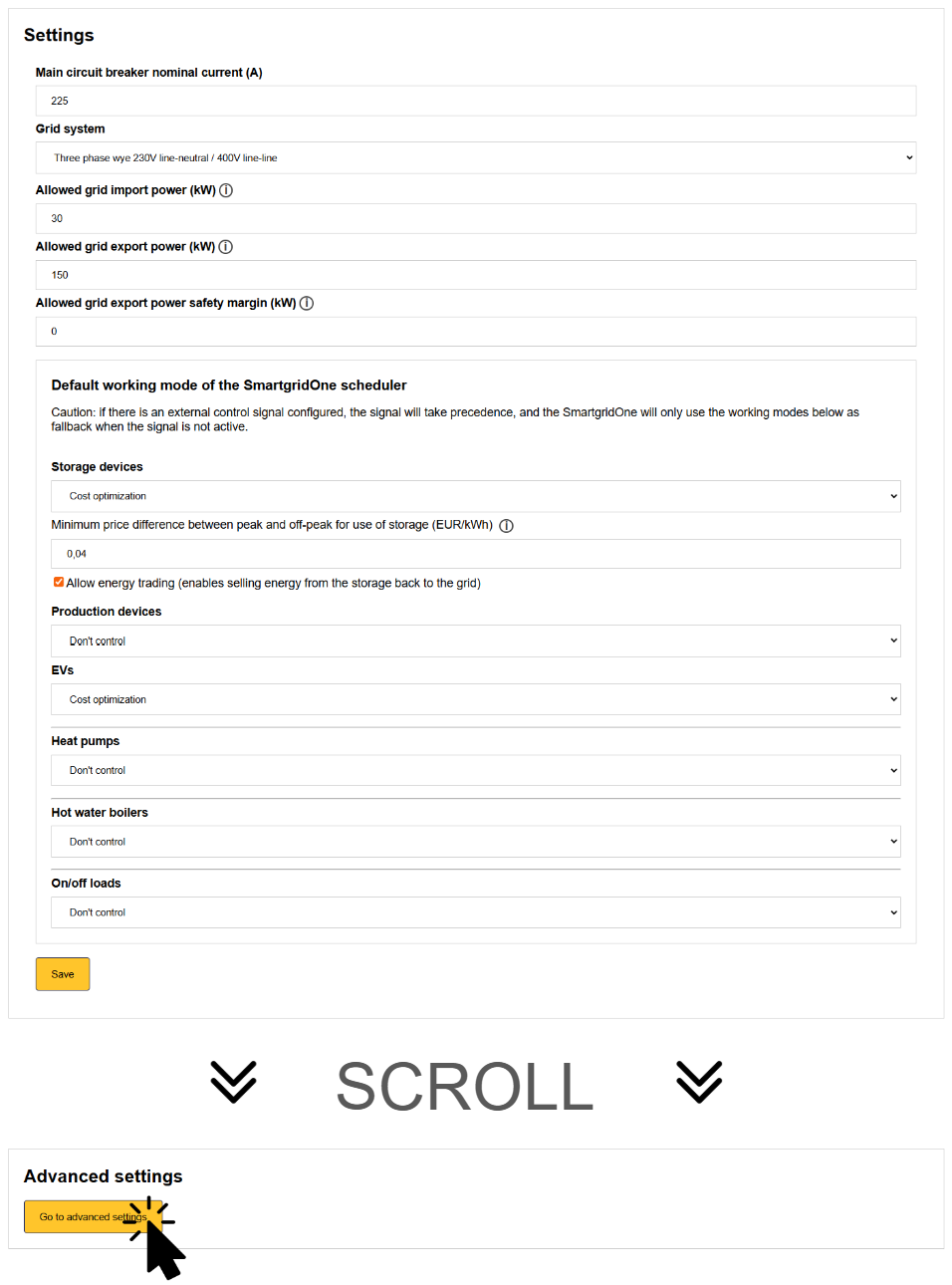
- Modifiez le réglage "Enable device settling check" à
False:
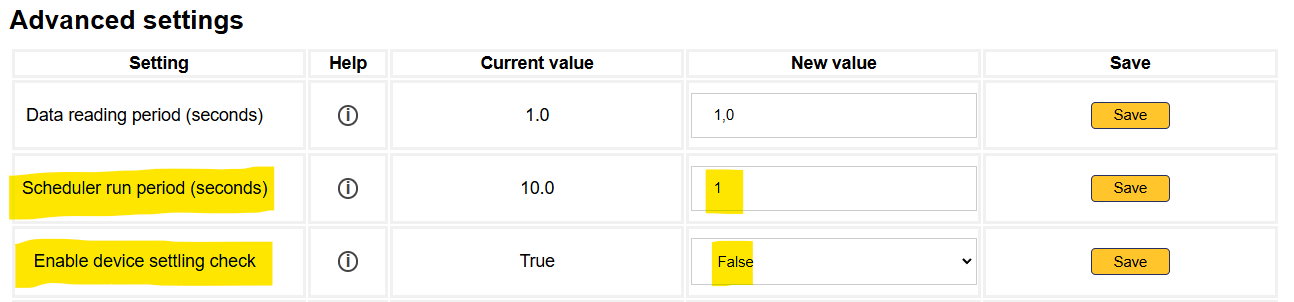
- Cliquez sur 'Save' à droite de la ligne.
Limitation sur le bus RS485
Lorsque plusieurs appareils sont connectés au bus RS485, le temps de réponse du contrôle peut être affecté en raison de la limitation inhérente à la communication RS485 : un seul appareil peut communiquer à la fois.
Comme les appareils communiquent à tour de rôle sur le bus, chaque appareil supplémentaire augmente le temps global du cycle de communication. Cela peut entraîner un ralentissement des temps de réponse pour tous les appareils connectés.
Pour des performances optimales :
- Limitez le nombre d'appareils à 5 ou moins par bus RS485
- Utilisez des accessoires d'expansion RS485 lorsque vous connectez plus d'appareils
Astuce
Pour des informations détaillées sur le câblage RS485 et les bonnes pratiques, reportez-vous au guide Wiring Best Practices.
Intervalle du planificateur
L'intervalle du planificateur détermine la fréquence à laquelle le SmartgridOne Controller vérifie les nouvelles commandes et les envoie aux appareils. Un intervalle plus court permet des temps de réponse plus rapides, tandis qu'un intervalle plus long peut entraîner des délais dans l'exécution des commandes.
Vérifiez si l'intervalle du planificateur est réglé sur une valeur raisonnable pour votre cas d'utilisation. L'intervalle par défaut est de 1 seconde, mais vous pouvez l'ajuster dans les paramètres avancés :
Click here to see the instructions
- Ouvrez la page des paramètres :
- Modifiez le réglage "Enable device settling check" à
False:
- Cliquez sur 'Save' à droite de la ligne.